 Copyright © Michael Richmond.
This work is licensed under a Creative Commons License.
Copyright © Michael Richmond.
This work is licensed under a Creative Commons License.
You've seen the rotational analog of simple 1-D kinematics, which answer questions like
But what about rotational dynamics, which addresses deeper questions, such as
Once again, we'll use your knowledge of physics in the linear world to guide us through the rotational realm.
A torque, it turns out, is a bit more complicated than a force; in order to compute the torque on an object, you need to know not only the size of the force involved, and the location at which it acts, but also the DIRECTION of the force.
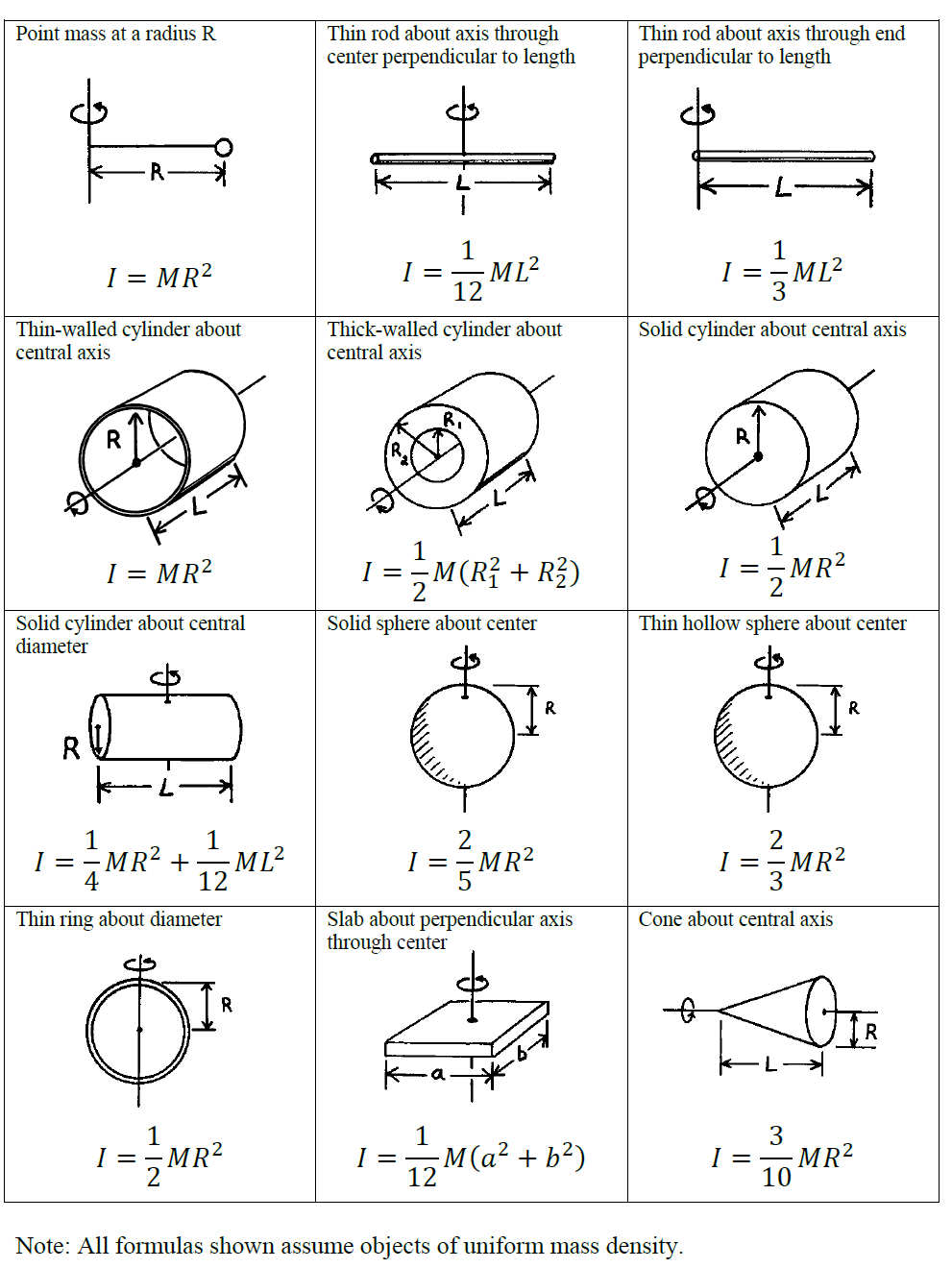
Problems involving rotation and torque usually require one to know the moment of inertia of objects. Now, under certain simple circumstances, we know how to compute it:

But what if the situation is not quite so simple? For example, suppose that the object IS a basic shape, but is NOT rotating around its center?

In this case, you can use the
Finally, what if the object in question is just not simple at all. Perhaps it's an unusual or asymmetric shape, or maybe it's made up of material which has a non-uniform density. When all other methods fail, there is one foolproof (although perhaps difficult) method for computing the moment of inertia:
Copyright © Michael Richmond.
This work is licensed under a Creative Commons License.
{kind=link}