 Copyright © Michael Richmond.
This work is licensed under a Creative Commons License.
Copyright © Michael Richmond.
This work is licensed under a Creative Commons License.
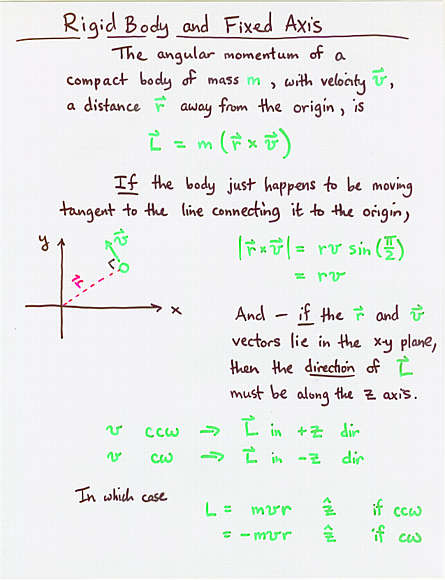
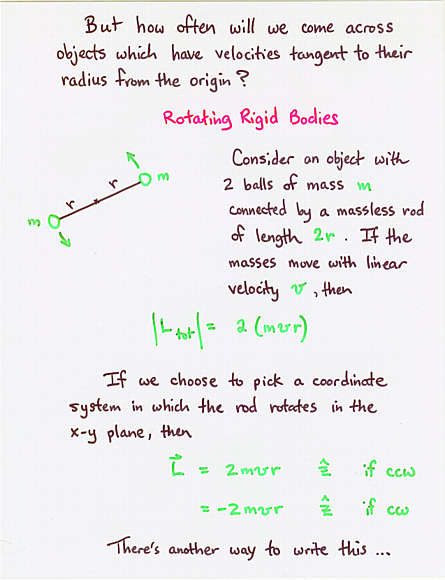
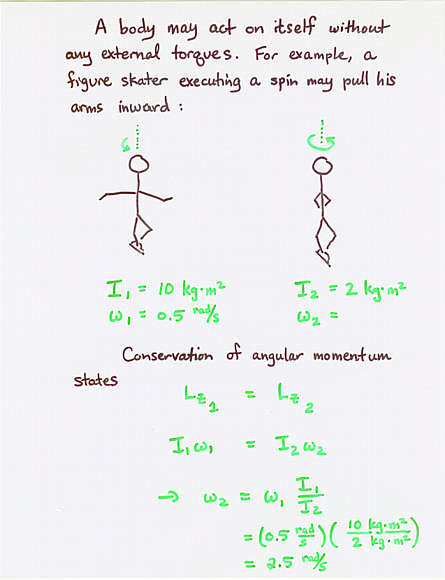
angular momentum = (moment of inertia) * (angular velocity)
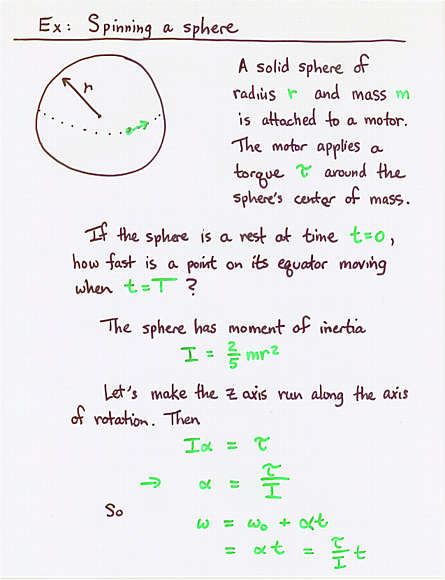
dL/dt = (moment of inertia) * (angular accleration)
= sum of external torques
This lecture discusses material in Chapter 11 of Serway.
Copyright © Michael Richmond.
This work is licensed under a Creative Commons License.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}