Torque as a vector quantity
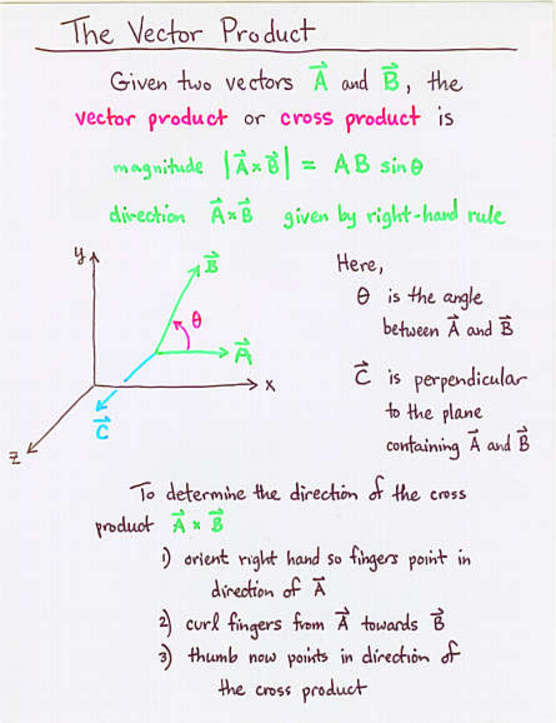
- The vector or cross product is another way to combine two
vectors; it creates a vector perpendicular to both
it the originals.
- In vector form, torque is the
cross product of the radius vector
(from axis of rotation to point of application of force)
and the force vector.
-
 Viewgraph 3
Viewgraph 3
-
 Viewgraph 4
Viewgraph 4
-
 Viewgraph 5
Viewgraph 5
There are other ways of computing and expressing the
cross product of two vectors.
For example, given two vectors A and B
in the standard
unit-vector notation
one can combine the components of the two vectors to form
the cross product A x B like so:
One way to remember this particular arrangement is to
consider the cross product as a determinant
(see Appendix E of your physics text):
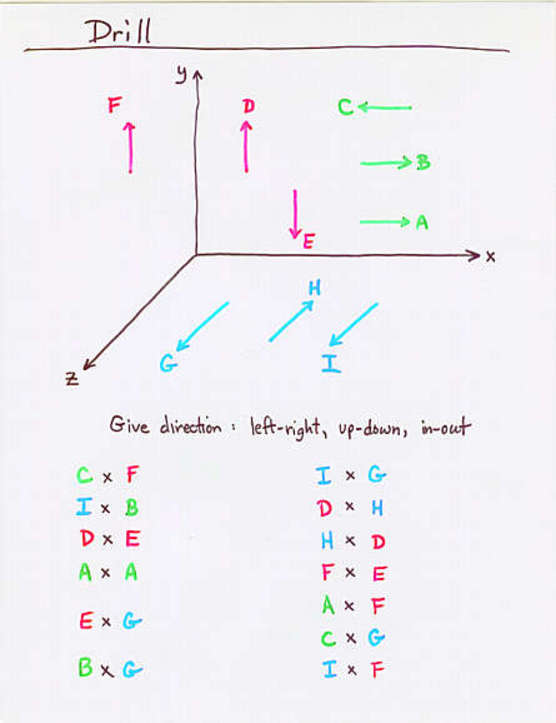
We are interested in one particular cross product:
Note several things:
- the maximum size of the torque is the
product of the magnitude of r and the magnitude of F
- the direction of the torque will be perpendicular
to both r and F
- if a force points straight toward (or away from)
the axis of rotation,
then the torque due to that force is zero